MAKE A MEME
View Large Image
| View Original: | 4D-RCS_reference_model_architecture_for_an_individual_vehicle.jpg (1031x548) | |||
| Download: | Original | Medium | Small | Thumb |
| Courtesy of: | commons.wikimedia.org | More Like This | ||
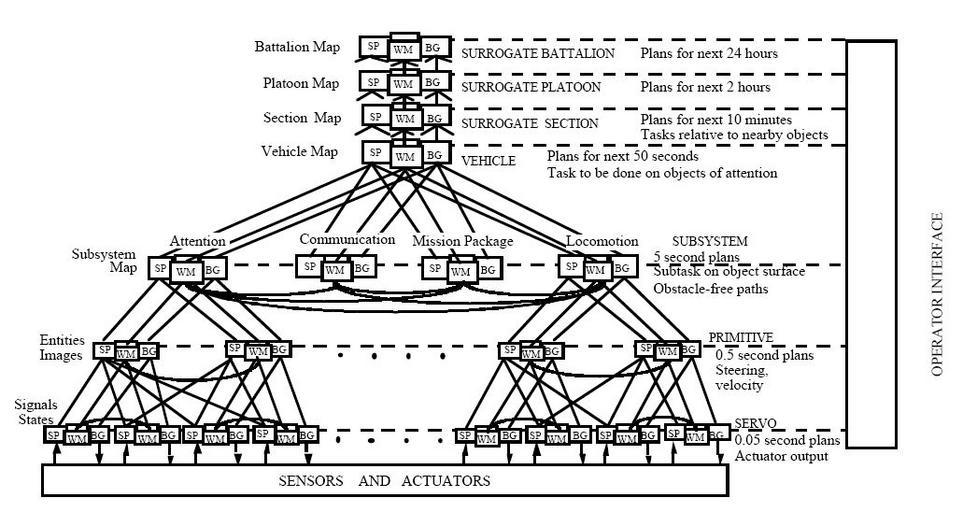
| Keywords: 4D-RCS reference model architecture for an individual vehicle.jpg en 4D/RCS reference model architecture for an individual vehicle Processing nodes are organized such that the BG modules form a command tree Information in the KD is shared between WM modules in nodes above below and at the same level within the same subtree KD modules are not shown in this figure On the right are examples of the functional characteristics of the BG modules at each level On the left are examples of the data types and maps maintained by the WM in the KD knowledge database at each level Sensory data paths flowing up the hierarchy typically form a graph not a tree VJ modules are hidden behind WM modules An operator interface provides input to and output from modules in every node A control loop may be closed at every node 4D-RCS A Reference Model Architecture For Unmanned Vehicle Systems Version 2 0 Albus et al National Institute of Standards and Technology Gaithersburg Maryland 20899 2002-08 PD-USGov 4D-RCS Reference Model Architecture | ||||
{kind=link}
{kind=link}